 +
+
+
+ +
+ +
+The STM32L4 Discovery kit IoT enables a wide diversity of applications by exploiting low-power communication, multiway sensing and Arm Cortex M4 core-based STM32L4 Series features.
+The support for Arduino and PMOD connectivity provides unlimited expansion capabilities with a large choice of specialized add-on boards.
+
+This board features a STM32L475E MCU with 1 MB of Flash memory and 128 KB of RAM. In addition to the MCU peripherals, the board includes:
+ - 64 Mb SPI Flash memory
+ - Bluetooth V4.1 module (SPBTLE-RF)
+ - 915 MHz low-power RF module (SPSGRF-915)
+ - 802.11 b/g/n module (ISM43362-M3G-L44)
+ - NFC tag based on M24SR with printed antenna
+ - 2 digital microphones (MP34DT01)
+ - relative humidity and temperature digital sensor (HTS221)
+ - 3-axis magnetometer (LIS3MDL)
+ - 3-axis accelerometer and gyroscope (LSM6DSL)
+ - digital barometer (LPS22HB)
+ - Time-of-Flight and gesture-detection sensor (VL53L0X)
+ - programmable push-buttons
+ - USB OTG FS with Micro-AB connector
+ - on-board ST-LINK/V2 debugger and programmer
+
+Examples on how to start developing with this board are available [here](/docs/tutorials/demos/tof_demo/).
+
+
+## Crazyflie 2.1 Drone
+
+As an integration example, the open-source [Crazyflie 2.1](https://www.bitcraze.io/products/crazyflie-2-1/) platform has its own micro-ROS + FreeRTOS port.
+
+
+
+The Crazyflie 2.1 is a versatile open-source flying development platform that only weighs 27g and fits in the palm of your hand. Crazyflie 2.1 is equipped with multiple inertial sensors and low-latency/long-range radio as well as Bluetooth LE.
+
+This little drone features a STM32F405 ARM Cortex-M4 MCU running up to 168 MHz with 1 MB of Flash and 192 KB of RAM. It also features the following sensors and coprocessors:
+ - nRF51822 radio and power management MCU (Cortex-M0, 32Mhz, 16kb SRAM, 128kb flash)
+ - USB
+ - LiPo battery charger
+ - 8KB EEPROM
+ - 3-axis accelerometer and gyroscope (BMI088)
+ - pressure sensor (BMP388)
+ - headers with peripheral access: SPI, I2C, UART, 1-wire and GPIO
+
+Examples on how to start developing with this board are available [here](/docs/tutorials/demos/crazyflie_demo/).
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg
new file mode 100644
index 00000000..a1329cda
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg
new file mode 100644
index 00000000..962d5666
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg
new file mode 100644
index 00000000..fe1055b1
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png
new file mode 100644
index 00000000..6319acdc
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg
new file mode 100644
index 00000000..f74ee208
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md b/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
index bf1d2836..7471702b 100644
--- a/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
+++ b/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
@@ -3,4 +3,397 @@ title: FreeRTOS Getting Started
permalink: /docs/tutorials/advanced/freertos/freertos_getting_started/
---
-WIP
\ No newline at end of file
+This tutorial aims to create a new micro-ROS application on **[Olimex STM32-E407](https://www.olimex.com/Products/ARM/ST/STM32-E407/open-source-hardware)** evaluation board with **[FreeRTOS RTOS](https://www.freertos.org/)**
+
+
+
+
+
+
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+
+
+The STM32L4 Discovery kit IoT enables a wide diversity of applications by exploiting low-power communication, multiway sensing and Arm Cortex M4 core-based STM32L4 Series features.
+The support for Arduino and PMOD connectivity provides unlimited expansion capabilities with a large choice of specialized add-on boards.
+
+This board features a STM32L475E MCU with 1 MB of Flash memory and 128 KB of RAM. In addition to the MCU peripherals, the board includes:
+ - 64 Mb SPI Flash memory
+ - Bluetooth V4.1 module (SPBTLE-RF)
+ - 915 MHz low-power RF module (SPSGRF-915)
+ - 802.11 b/g/n module (ISM43362-M3G-L44)
+ - NFC tag based on M24SR with printed antenna
+ - 2 digital microphones (MP34DT01)
+ - relative humidity and temperature digital sensor (HTS221)
+ - 3-axis magnetometer (LIS3MDL)
+ - 3-axis accelerometer and gyroscope (LSM6DSL)
+ - digital barometer (LPS22HB)
+ - Time-of-Flight and gesture-detection sensor (VL53L0X)
+ - programmable push-buttons
+ - USB OTG FS with Micro-AB connector
+ - on-board ST-LINK/V2 debugger and programmer
+
+Examples on how to start developing with this board are available [here](/docs/tutorials/demos/tof_demo/).
+
+
+## Crazyflie 2.1 Drone
+
+As an integration example, the open-source [Crazyflie 2.1](https://www.bitcraze.io/products/crazyflie-2-1/) platform has its own micro-ROS + FreeRTOS port.
+
+
+
+The Crazyflie 2.1 is a versatile open-source flying development platform that only weighs 27g and fits in the palm of your hand. Crazyflie 2.1 is equipped with multiple inertial sensors and low-latency/long-range radio as well as Bluetooth LE.
+
+This little drone features a STM32F405 ARM Cortex-M4 MCU running up to 168 MHz with 1 MB of Flash and 192 KB of RAM. It also features the following sensors and coprocessors:
+ - nRF51822 radio and power management MCU (Cortex-M0, 32Mhz, 16kb SRAM, 128kb flash)
+ - USB
+ - LiPo battery charger
+ - 8KB EEPROM
+ - 3-axis accelerometer and gyroscope (BMI088)
+ - pressure sensor (BMP388)
+ - headers with peripheral access: SPI, I2C, UART, 1-wire and GPIO
+
+Examples on how to start developing with this board are available [here](/docs/tutorials/demos/crazyflie_demo/).
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg
new file mode 100644
index 00000000..a1329cda
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/1.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg
new file mode 100644
index 00000000..962d5666
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/2.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg
new file mode 100644
index 00000000..fe1055b1
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/3.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png
new file mode 100644
index 00000000..6319acdc
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/4.png differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg
new file mode 100644
index 00000000..f74ee208
Binary files /dev/null and b/_docs/tutorials/advanced/freertos/freertos_getting_started/imgs/5.jpg differ
diff --git a/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md b/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
index bf1d2836..7471702b 100644
--- a/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
+++ b/_docs/tutorials/advanced/freertos/freertos_getting_started/index.md
@@ -3,4 +3,397 @@ title: FreeRTOS Getting Started
permalink: /docs/tutorials/advanced/freertos/freertos_getting_started/
---
-WIP
\ No newline at end of file
+This tutorial aims to create a new micro-ROS application on **[Olimex STM32-E407](https://www.olimex.com/Products/ARM/ST/STM32-E407/open-source-hardware)** evaluation board with **[FreeRTOS RTOS](https://www.freertos.org/)**
+
+
+
+
+
+
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+ +
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build --metas src
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the usb to serial cable:
+
+
+
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build --metas src
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the usb to serial cable:
+
+ +
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`*
+
+And finally, let's check that everything is working in a new command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
+
+
+
+
+
+
diff --git a/_docs/tutorials/advanced/linux/linux_getting_started/index.md b/_docs/tutorials/advanced/linux/linux_getting_started/index.md
new file mode 100644
index 00000000..be019371
--- /dev/null
+++ b/_docs/tutorials/advanced/linux/linux_getting_started/index.md
@@ -0,0 +1,392 @@
+---
+title: Linux Getting Started
+permalink: /docs/tutorials/advanced/linux/linux_getting_started/
+---
+
+This tutorial aims to create a new micro-ROS application on Linux for testing purposes.
+
+## Adding a new micro-ROS app
+
+First of all, make sure that you have a **ROS 2** installation.
+
+***TIP:** if you are familiar with Docker containers, this image may be useful: [ros:dashing](https://hub.docker.com/layers/ros/library/ros/dashing/images/sha256-b796c14ea663537129897769aa6c715a851ca08dffd4875ef2ecaa31a4dbd431?context=explore)*
+
+On the **ROS 2** installation open a command line and follow these steps:
+
+```bash
+# Source the ROS 2 installation
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Create a workspace and download the micro-ROS tools
+mkdir microros_ws
+cd microros_ws
+git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro-ros-build.git src/micro-ros-build
+
+# Update dependencies using rosdep
+sudo apt update && rosdep update
+rosdep install --from-path src --ignore-src -y
+
+# Build micro-ROS tools and source them
+colcon build
+source install/local_setup.bash
+```
+
+Now, let's create a firmware workspace that targets all the required code and tools:
+
+```bash
+# Create step
+ros2 run micro_ros_setup create_firmware_ws.sh host
+```
+
+Now you have all the required tools to build micro-ROS. At this point, you must know that the micro-ROS build system is a four-step workflow:
+
+
+1. **Create**: retrieves all the required packages for a specific RTOS and hardware platform.
+2. **Configure**: configures the downloaded packages with options such as the micro-ROS application, the selected transport layer or the micro-ROS agent IP address (in network transports).
+3. **Build**: generates a binary file ready for being loaded in the hardware.
+4. **Flash**: load the micro-ROS software in the hardware.
+
+micro-ROS apps for Linux are located at `src/uros/micro-ROS-demos/rcl/`. In order to create a new application, create a new folder containing two files: the app code and the CMake file.
+
+```bash
+# Creating a new app
+pushd src/uros/micro-ROS-demos/rcl/
+mkdir my_brand_new_app
+cd my_brand_new_app
+touch app.c CMakeLists.txt
+popd
+```
+
+For this example we are going to create a ping pong app where a node sends a ping package with a unique identifier using a publisher and the same package is received by a pong subscriber. The node will also answer to pings received from other nodes with a pong message:
+
+
+
+To start creating this app, the `CMakeLists.txt` file should looks like:
+
+```cmake
+cmake_minimum_required(VERSION 3.5)
+
+project(my_brand_new_app LANGUAGES C)
+
+find_package(ament_cmake REQUIRED)
+find_package(rcl REQUIRED)
+find_package(std_msgs REQUIRED)
+find_package(rmw_microxrcedds REQUIRED)
+
+add_executable(${PROJECT_NAME} app.c)
+
+ament_target_dependencies(${PROJECT_NAME}
+ rcl
+ std_msgs
+ rmw_microxrcedds
+ )
+
+install(TARGETS ${PROJECT_NAME}
+ DESTINATION ${PROJECT_NAME}
+ )
+```
+
+Meanwhile `app.c` should look like the following code:
+
+```c
+#include
+
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`*
+
+And finally, let's check that everything is working in a new command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+pgarrido@pgarrido:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
+
+
+
+
+
+
diff --git a/_docs/tutorials/advanced/linux/linux_getting_started/index.md b/_docs/tutorials/advanced/linux/linux_getting_started/index.md
new file mode 100644
index 00000000..be019371
--- /dev/null
+++ b/_docs/tutorials/advanced/linux/linux_getting_started/index.md
@@ -0,0 +1,392 @@
+---
+title: Linux Getting Started
+permalink: /docs/tutorials/advanced/linux/linux_getting_started/
+---
+
+This tutorial aims to create a new micro-ROS application on Linux for testing purposes.
+
+## Adding a new micro-ROS app
+
+First of all, make sure that you have a **ROS 2** installation.
+
+***TIP:** if you are familiar with Docker containers, this image may be useful: [ros:dashing](https://hub.docker.com/layers/ros/library/ros/dashing/images/sha256-b796c14ea663537129897769aa6c715a851ca08dffd4875ef2ecaa31a4dbd431?context=explore)*
+
+On the **ROS 2** installation open a command line and follow these steps:
+
+```bash
+# Source the ROS 2 installation
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Create a workspace and download the micro-ROS tools
+mkdir microros_ws
+cd microros_ws
+git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro-ros-build.git src/micro-ros-build
+
+# Update dependencies using rosdep
+sudo apt update && rosdep update
+rosdep install --from-path src --ignore-src -y
+
+# Build micro-ROS tools and source them
+colcon build
+source install/local_setup.bash
+```
+
+Now, let's create a firmware workspace that targets all the required code and tools:
+
+```bash
+# Create step
+ros2 run micro_ros_setup create_firmware_ws.sh host
+```
+
+Now you have all the required tools to build micro-ROS. At this point, you must know that the micro-ROS build system is a four-step workflow:
+
+
+1. **Create**: retrieves all the required packages for a specific RTOS and hardware platform.
+2. **Configure**: configures the downloaded packages with options such as the micro-ROS application, the selected transport layer or the micro-ROS agent IP address (in network transports).
+3. **Build**: generates a binary file ready for being loaded in the hardware.
+4. **Flash**: load the micro-ROS software in the hardware.
+
+micro-ROS apps for Linux are located at `src/uros/micro-ROS-demos/rcl/`. In order to create a new application, create a new folder containing two files: the app code and the CMake file.
+
+```bash
+# Creating a new app
+pushd src/uros/micro-ROS-demos/rcl/
+mkdir my_brand_new_app
+cd my_brand_new_app
+touch app.c CMakeLists.txt
+popd
+```
+
+For this example we are going to create a ping pong app where a node sends a ping package with a unique identifier using a publisher and the same package is received by a pong subscriber. The node will also answer to pings received from other nodes with a pong message:
+
+
+
+To start creating this app, the `CMakeLists.txt` file should looks like:
+
+```cmake
+cmake_minimum_required(VERSION 3.5)
+
+project(my_brand_new_app LANGUAGES C)
+
+find_package(ament_cmake REQUIRED)
+find_package(rcl REQUIRED)
+find_package(std_msgs REQUIRED)
+find_package(rmw_microxrcedds REQUIRED)
+
+add_executable(${PROJECT_NAME} app.c)
+
+ament_target_dependencies(${PROJECT_NAME}
+ rcl
+ std_msgs
+ rmw_microxrcedds
+ )
+
+install(TARGETS ${PROJECT_NAME}
+ DESTINATION ${PROJECT_NAME}
+ )
+```
+
+Meanwhile `app.c` should look like the following code:
+
+```c
+#include  +
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+
+
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+ +
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build --metas src
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the usb to serial cable:
+
+
+
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build --metas src
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the usb to serial cable:
+
+ +
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`*
+
+And finally, let's check that everything is working in a new command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+user@user:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
\ No newline at end of file
diff --git a/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg b/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg
new file mode 100644
index 00000000..6f3ad643
Binary files /dev/null and b/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg differ
diff --git a/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md b/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md
new file mode 100644
index 00000000..c9d6cb6f
--- /dev/null
+++ b/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md
@@ -0,0 +1,404 @@
+---
+title: Zephyr Emulator
+permalink: /docs/tutorials/advanced/zephyr/zephyr_emulator/
+---
+
+This tutorial aims to create a new micro-ROS application on with **[Zephyr RTOS](https://www.zephyrproject.org/)** emulator (also known as [Native POSIX](https://docs.zephyrproject.org/latest/boards/posix/native_posix/doc/index.html)).
+
+
+
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`*
+
+And finally, let's check that everything is working in a new command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+user@user:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
\ No newline at end of file
diff --git a/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg b/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg
new file mode 100644
index 00000000..6f3ad643
Binary files /dev/null and b/_docs/tutorials/advanced/zephyr/zephyr_emulator/imgs/4.jpg differ
diff --git a/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md b/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md
new file mode 100644
index 00000000..c9d6cb6f
--- /dev/null
+++ b/_docs/tutorials/advanced/zephyr/zephyr_emulator/index.md
@@ -0,0 +1,404 @@
+---
+title: Zephyr Emulator
+permalink: /docs/tutorials/advanced/zephyr/zephyr_emulator/
+---
+
+This tutorial aims to create a new micro-ROS application on with **[Zephyr RTOS](https://www.zephyrproject.org/)** emulator (also known as [Native POSIX](https://docs.zephyrproject.org/latest/boards/posix/native_posix/doc/index.html)).
+
+ +
+
+
+
+
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+
+
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the USB OTG 2 connector (the miniUSB connector that is furthest from the Ethernet port).
+
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`. Probably it will be something like `/dev/serial/by-id/usb-ZEPHYR_Zephyr_microROS_3536510100290035-if00`*
+
+And finally, let's check that everything is working in another command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+user@user:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
diff --git a/_docs/tutorials/core/programming_rcl_rclc/index.md b/_docs/tutorials/core/programming_rcl_rclc/index.md
index 01bbd8f4..8a83e683 100644
--- a/_docs/tutorials/core/programming_rcl_rclc/index.md
+++ b/_docs/tutorials/core/programming_rcl_rclc/index.md
@@ -1,8 +1,6 @@
---
title: Programming with rcl and rclc
permalink: /docs/tutorials/core/programming_rcl_rclc/
-redirect_from: /docs/tutorials/core/
-redirect_from: /docs/tutorials/
---
## Programming client/service with rcl
diff --git a/_docs/tutorials/demos/crazyflie_demo/index.md b/_docs/tutorials/demos/crazyflie_demo/index.md
index cc34893b..7447d116 100644
--- a/_docs/tutorials/demos/crazyflie_demo/index.md
+++ b/_docs/tutorials/demos/crazyflie_demo/index.md
@@ -1,302 +1,10 @@
---
title: Crazyflie Demo
+layout: docs_noheader
permalink: /docs/tutorials/demos/crazyflie_demo/
redirect_from:
- /crazyflie_demo/
---
-This demo aims to expose a **micro-ROS** use case. It runs on a pair of embedded devices:
-a [**Crazyflie 2.1**](https://www.bitcraze.io/crazyflie-2-1/) drone, used as a user controller,
-and a [**Kobuki Turtlebot 2**](https://www.turtlebot.com/turtlebot2/) as a mobile and controlled device.
-
-
-
-Both of them rely on **micro-ROS** publication and subscription mechanisms and use an underlying [**Micro XRCE-DSS client**](https://micro-xrce-dds.readthedocs.io/en/latest/).
-
-This demo also includes conventional ROS 2 tooling as a demonstration of integration with **ROS 2**. We use Gazebo, RVIZ and simple ROS 2 nodes (aka **external nodes**) acting as data converters.
-
-This demo was developed taking as base the [Kobuki demo](/docs/tutorials/demos/kobuki_demo).
-
-## Index
-- [Installation](#installation)
- - [Install external ROS 2 nodes](#install-external-ros-2-nodes)
- - [Build and flash Crazyflie 2.1 firmware](#build-and-flash-crazyflie-21-firmware)
- - [Install Crazyflie Client + Bridge](#install-crazyflie-client--bridge)
- - [Build and flash Kobuki Turtlebot 2 firmware](#build-and-flash-kobuki-turtlebot-2-firmware)
-- [Usage](#usage)
- - [Run Kobuki Turtlebot 2 Node](#run-kobuki-turtlebot-2-node)
- - [Run Crazyflie 2.1 Node](#run-crazyflie-21-node)
- - [Run external ROS 2 nodes](#run-external-ros-2-nodes)
- - [Run RVIZ visualizers](#run-rviz-visualizers)
-
-## Setup
-
-The proposed demo is composed of different kind of messages and topics.
-
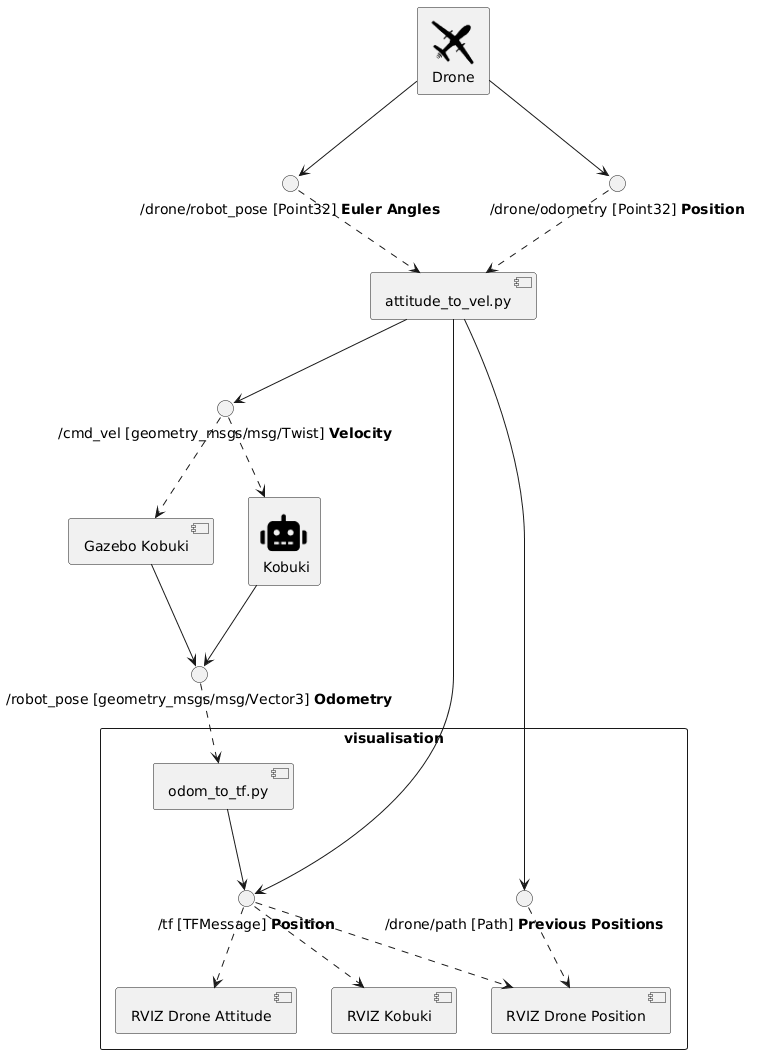
-The **Crazyflie 2.1** drone relies on [ST STM32F405](https://www.st.com/en/microcontrollers-microprocessors/stm32f405-415.html) MCU running **[FreeRTOS](https://www.freertos.org/)**. Using the RTOS capabilities and the integrated radio communication device, the drone can run a node that publishes:
-- its own relative position as a 3D vector (X, Y and Z) using a *geometry_msg/Point32* message type on */drone/odometry* topic.
-- its own attitude as a 3D vector (pitch, roll and yaw) using a *geometry_msg/Point32* message type on */drone/attitude* topic.
-
-The **Kobuki Turtlebot 2** robot is controlled using a UART protocol through a custom DB25 connector. The micro-ROS node runs on an Olimex STM32-E407 board attached to that UART port. This hardware features a [ST STM32F407](https://www.st.com/en/microcontrollers-microprocessors/stm32f407-417.html) MCU running **[Nuttx](https://nuttx.org/)** RTOS. In the same way, this node can communicate with the robot (UART) and with the ROS2 world (integrated Ethernet). Its used topics are:
-- a subscription on */cmd_vel* topic (*geometry_msg/Twist* message type) to receive the controlling angular and linear velocity.
-- a publication on */robot_pose* topic (*geometry_msg/Vector3* message type) which includes X position, Y position and robot yaw.
-
-The **external ROS 2 nodes** are rclpy tools with some different functionalities:
-- *attitude_to_vel.py*
- - Converts Crazyflie */drone/attitude* to Kobuki Turtlebot 2 */cmd_vel* so that drone pitch is mapped to robot linear velocity and drone roll to angular valocity.
- - Converts Crazyflie publications on */drone/attitude* and */drone/attitude* topics to *tf2_msgs/TFMessage* messages (required by RVIZ visualizer)
-- *odom_to_tf.py*
- - Converts Kobuki Turtlebot 2 publications on */robot_pose* topic to *tf2_msgs/TFMessage* messages (required by RVIZ visualizer).
-
-The following image shows the described setup.
-
-
-
-## Required Hardware
-
-This setup uses the following hardware:
-
-| Item | |
-|---------------|----------------------------------------------------------|
-| Kobuki Turtlebot 2 | [Link](https://www.turtlebot.com/turtlebot2/) |
-| Olimex STM32-E407 | [Link](https://www.olimex.com/Products/ARM/ST/STM32-E407/open-source-hardware) |
-| Olimex ARM-USB-TINY-H | [Link](https://www.olimex.com/Products/ARM/JTAG/ARM-USB-TINY-H/) |
-| Crazyflie 2.1 | [Link](https://store.bitcraze.io/products/crazyflie-2-1) |
-| Flow Desk v2 | [Link](https://store.bitcraze.io/collections/decks/products/flow-deck-v2) |
-| Debug adapter | [Link](https://store.bitcraze.io/collections/accessories/products/debug-adapter) |
-| Crazyradio PA 2.4 GHz USB dongle | [Link](https://store.bitcraze.io/collections/accessories/products/crazyradio-pa) |
-| Additional battery + charger (optional) | [Link](https://store.bitcraze.io/collections/accessories/products/240mah-lipo-battery-including-500ma-usb-charger) |
-
-
-# Installation
-
-## Install external ROS 2 nodes
-
-[Install Micro XCRE-DDS](https://micro-xrce-dds.readthedocs.io/en/latest/installation.html). Recommended procedure:
-
-```bash
-git clone https://github.com/eProsima/Micro-XRCE-DDS.git -b v1.1.0
-cd Micro-XRCE-DDS
-mkdir build && cd build
-cmake ..
-make
-sudo make install
-```
-
-Create a workspace folder for this demo:
-```bash
-mkdir -p crazyflie_demo/src
-cd crazyflie_demo
-```
-
-Clone this repo:
-```bash
-git clone --single-branch --branch crazyflie_demo https://github.com/micro-ROS/micro-ROS_kobuki_demo src
-```
-
-[Install Gazebo](http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install#InstallGazebousingUbuntupackages). Recommended procedure:
-```bash
-curl -sSL http://get.gazebosim.org | sh
-```
-
-[Install gazebo_ros_pkgs (ROS 2)](http://gazebosim.org/tutorials?tut=ros2_installing&cat=connect_ros). Recommended procedure:
-```bash
-source /opt/ros/dashing/setup.bash
-wget https://bitbucket.org/api/2.0/snippets/chapulina/geRKyA/f02dcd15c2c3b83b2d6aac00afe281162800da74/files/ros2.yaml
-vcs import src < ros2.yaml
-rosdep update && rosdep install --from-paths src --ignore-src -r -y
-rm ros2.yaml
-```
-
-Build the project:
-```bash
-source /opt/ros/dashing/setup.bash
-rosdep update && rosdep install --from-paths src --ignore-src -r -y
-colcon build --symlink-install
-```
-
-## Build and flash Crazyflie 2.1 firmware
-
-Install the toolchain:
-```bash
-sudo add-apt-repository ppa:team-gcc-arm-embedded/ppa
-sudo apt-get update
-sudo apt install gcc-arm-embedded dfu-util
-```
-
-Download and build the **Crazyflie 2.1** firmware repository:
-```bash
-mkdir crazyflie_firmware
-git clone https://github.com/eProsima/crazyflie-firmware -b crazyflie_demo
-cd crazyflie_firmware
-git submodule init
-git submodule update
-make PLATFORM=cf2
-```
-
-Unplug the **Crazyflie 2.1** battery
-
-Push the reset button while connecting the USB power supply.
-
-The top-left blue LED blinks, first slowly and after 4 seconds sightly faster, now it is in DFU programming mode. Check it with `lsusb`:
-```bash
-Bus 001 Device 051: ID 0483:df11 STMicroelectronics STM Device in DFU Mode
-```
-
-Flash the device:
-```bash
-sudo dfu-util -d 0483:df11 -a 0 -s 0x08000000 -D cf2.bin
-```
-
-Unplug and plug the **Crazyflie 2.1** power to exit DFU mode.
-
-
-## Install Crazyflie Client + Bridge
-
-Install dependencies:
-```
-sudo apt-get install libusb-1.0-0-dev
-sudo apt-get install python3 python3-pip python3-pyqt5 python3-pyqt5.qtsvg
-```
-
-Fix permissions for the Crazyradio PA 2.4 GHz USB dongle (restart required for apply changes):
-```
-sudo groupadd plugdev
-sudo usermod -a -G plugdev $USER
-sudo echo SUBSYSTEM==\"usb\", ATTRS{idVendor}==\"1915\", ATTRS{idProduct}==\"7777\", \
-MODE=\"0664\", GROUP=\"plugdev\" > /etc/udev/rules.d/99-crazyradio.rules
-sudo echo SUBSYSTEM==\"usb\", ATTRS{idVendor}==\"0483\", ATTRS{idProduct}==\"5740\", \
-MODE=\"0664\", GROUP=\"plugdev\" > /etc/udev/rules.d/99-crazyflie.rules
-```
-
-Clone the repo dependencies:
-```
-git clone -b Micro-XRCE-DDS_Bridge https://github.com/eProsima/crazyflie-clients-python
-```
-
-## Build and flash Kobuki Turtlebot 2 firmware
-
-Create a workspace for building **micro-ROS**:
-```
-source /opt/ros/crystal/setup.bash
-sudo apt install python-rosdep curl flex ed gperf openocd automake ed bison libncurses5-dev gcc-arm-none-eabi clang clang-tidy usbutils
-mkdir -p kobuki-firmware/src
-cd kobuki-firmware
-git clone --recursive -b crazyflie_demo https://github.com/micro-ROS/micro-ros-build.git src/micro-ros-build
-colcon build --packages-select micro_ros_setup
-source install/local_setup.bash
-```
-
-Build **micro-ROS Agent**:
-```
-ros2 run micro_ros_setup create_agent_ws.sh
-colcon build
-source install/local_setup.sh
-```
-
-Install tools:
-```
-git clone https://bitbucket.org/nuttx/tools.git ~/tools
-pushd ~/tools/kconfig-frontends >/dev/null
-./configure --enable-mconf --disable-nconf --disable-gconf --disable-qconf
-LD_RUN_PATH=/usr/local/lib && make && make install && ldconfig
-popd >/dev/null
-```
-
-Build Olimex STM32-E407 firmware:
-```
-ros2 run micro_ros_setup create_firmware_ws.sh
-cd firmware/NuttX
-tools/configure.sh configs/olimex-stm32-e407/uros
-cd ../..
-
-#Put here your agent IP and port
-find ./firmware/mcu_ws/ -name rmw_microxrcedds.config -exec sed -i "s/CONFIG_IP=127.0.0.1/CONFIG_IP=192.168.8.10/g" {} \;
-find ./firmware/mcu_ws/ -name rmw_microxrcedds.config -exec sed -i "s/CONFIG_PORT=8888/CONFIG_PORT=9999/g" {} \;
-
-ros2 run micro_ros_setup build_firmware.sh
- ```
-
-Connect Olimex ARM-USB-TINY-H JTAG debugger to Olimex STM32-E407 and flash the board:
-```
-cd firmware/NuttX
-scripts/flash.sh olimex-stm32-e407
-```
-
-# Usage
-
-After installation, the following packages should be present in your system:
-
-```
-.
-+-- Micro-XRCE-DDS # used for installing Micro-XRCE-DDS
-+-- crazyflie_demo
-+-- crazyflie-firmware # used for building and flashing Crazyflie 2.1 firmware
-+-- kobuki-firmware # used for building and flashing Kobuki Turtlebot 2 firmware
-+-- crazyflie-clients-python
-```
-
-Make sure that all ROS 2 or micro-ROS nodes created along with the following steps **can reach each other using its network interfaces**.
-
-## Run Kobuki Turtlebot 2 Node
-
-TODO: Explain data and power connections between Kobuki Turtlebot 2, Olimex STM32-E407 and MiniRouter.
-
-Run the **micro-ROS Agent**:
-```
-cd kobuki-firmware
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 run micro_ros_agent micro_ros_agent udp 9999
-```
-
-**micro-ROS Agent** should receive an incoming client connection and */robot_pose* topic should be published. Check it with `ros2 topic echo /robot_pose`
-
-## Run Crazyflie 2.1 Node
-
-Connect Crazyradio PA 2.4 GHz USB dongle and turn on Crazyflie 2.1 drone.
-
-Run the Crazyflie Client + Bridge:
-```
-cd crazyflie-clients-python
-python3 bin/cfclient
-```
-
-This command should open the Crazyflie Client and print a serial device path in the terminal (something like /dev/pts/0).
-
-Run (in another prompt) a **Micro XRCE-DDS Agent**:
-```
-MicroXRCEAgent serial --dev [serial device]
-```
-
-**Micro XRCE-DDS Agent** should receive an incoming client connection and */drone/attitude* and */drone/position* topics should be published. Check it with `ros2 topic echo /drone/attitude` and `ros2 topic echo /drone/position`
-
-
-## Run external ROS 2 nodes
-
-Run commands:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 run micro-ros_crazyflie_demo_remote attitude_to_vel
-```
-
-Topic */cmd_vel* should be published, and the **Kobuki Turtlebot 2** should start moving. Check it with `ros2 topic echo /cmd_vel`
-
-## Run RVIZ visualizers
-Run complete visualizer:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 launch micro-ros_crazyflie_demo_remote launch_drone_position.launch.py
-```
-
-RVIZ windows should be open, and a Crazyflie 2.1 drone model should represent the drone attitude and position along with a historic path.
-
-Run attitude visualizer:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 launch micro-ros_crazyflie_demo_remote launch_drone_attitude.launch.py
-```
-
-RVIZ windows should be open and a Crazyflie 2.1 drone model should represent **only** the drone attitude.
\ No newline at end of file
+{% capture my_include %}{% include crazyflie_demo/README.md %}{% endcapture %}
+{{ my_include | markdownify }}
\ No newline at end of file
diff --git a/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png b/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png
deleted file mode 100644
index 0133a1ee..00000000
Binary files a/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png and /dev/null differ
diff --git a/_docs/tutorials/demos/tof_demo/index.md b/_docs/tutorials/demos/tof_demo/index.md
index 5dc4a63a..f9a4d19d 100644
--- a/_docs/tutorials/demos/tof_demo/index.md
+++ b/_docs/tutorials/demos/tof_demo/index.md
@@ -1,5 +1,8 @@
---
title: Time of Flight Sensor Demo
+layout: docs_noheader
permalink: /docs/tutorials/demos/tof_demo/
---
-WIP
\ No newline at end of file
+
+{% capture my_include %}{% include sensors_demo/README.md %}{% endcapture %}
+{{ my_include | markdownify }}
\ No newline at end of file
diff --git a/_includes/crazyflie_demo b/_includes/crazyflie_demo
new file mode 160000
index 00000000..841122e4
--- /dev/null
+++ b/_includes/crazyflie_demo
@@ -0,0 +1 @@
+Subproject commit 841122e49651a85d3e0d07fc01b9a2857c4cff99
diff --git a/_includes/sensors_demo b/_includes/sensors_demo
new file mode 160000
index 00000000..12bb858d
--- /dev/null
+++ b/_includes/sensors_demo
@@ -0,0 +1 @@
+Subproject commit 12bb858d105897dacf193516194ed059c31819c9
diff --git a/_layouts/docs_noheader.html b/_layouts/docs_noheader.html
new file mode 100644
index 00000000..2fbd6a39
--- /dev/null
+++ b/_layouts/docs_noheader.html
@@ -0,0 +1,26 @@
+---
+layout: default
+---
+
+
+
+
+
+
+
+Make sure that the board power supply jumper (PWR_SEL) is in the 3-4 position in order to power the board from the JTAG connector:
+
+
+
+You should see the red LED lighting. It is time to flash the board:
+
+```bash
+# Flash step
+ros2 run micro_ros_setup flash_firmware.sh
+```
+## Running the micro-ROS app
+
+The micro-ROS app is ready to connect to a micro-ROS-Agent and start talking with the rest of the ROS 2 world.
+
+First of all, create and build a micro-ROS agent:
+
+```bash
+# Download micro-ROS-Agent packages
+ros2 run micro_ros_setup create_agent_ws.sh
+
+# Build micro-ROS-Agent packages, this may take a while.
+colcon build
+source install/local_setup.bash
+```
+
+Then connect the Olimex development board to the computer using the USB OTG 2 connector (the miniUSB connector that is furthest from the Ethernet port).
+
+***TIP:** Color codes are applicable to [this cable](https://www.olimex.com/Products/Components/Cables/USB-Serial-Cable/USB-Serial-Cable-F/). Make sure to match Olimex Rx with Cable Tx and vice-versa. Remember GND!*
+
+Then run the agent:
+
+```bash
+# Run a micro-ROS agent
+ros2 run micro_ros_agent micro_ros_agent serial --dev [device]
+```
+
+***TIP:** you can use this command to find your serial device name: `ls /dev/serial/by-id/*`. Probably it will be something like `/dev/serial/by-id/usb-ZEPHYR_Zephyr_microROS_3536510100290035-if00`*
+
+And finally, let's check that everything is working in another command line. We are going to listen to ping topic to check whether the Ping Pong node is publishing its own pings
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS ping topic
+ros2 topic echo /microROS/ping
+```
+
+You should see the topic messages published by the Ping Pong node every 5 seconds:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 20
+ nanosec: 867000000
+frame_id: '1344887256_1085377743'
+---
+stamp:
+ sec: 25
+ nanosec: 942000000
+frame_id: '730417256_1085377743'
+---
+```
+
+On another command line, let's subscribe to the pong topic
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Subscribe to micro-ROS pong topic
+ros2 topic echo /microROS/pong
+```
+
+At this point, we know that our app is publishing pings. Let's check if it also answers to someone else pings in a new command line:
+
+```bash
+source /opt/ros/$ROS_DISTRO/setup.bash
+
+# Send a fake ping
+ros2 topic pub --once /microROS/ping std_msgs/msg/Header '{frame_id: "fake_ping"}'
+```
+
+Now, we should see on the ping subscriber our fake ping along with the board pings:
+
+```
+user@user:~$ ros2 topic echo /microROS/ping
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+stamp:
+ sec: 305
+ nanosec: 973000000
+frame_id: '451230256_1085377743'
+---
+stamp:
+ sec: 310
+ nanosec: 957000000
+frame_id: '2084670932_1085377743'
+---
+```
+
+And in the pong subscriber, we should see the board's answer to our fake ping:
+
+```
+user@user:~$ ros2 topic echo /microROS/pong
+stamp:
+ sec: 0
+ nanosec: 0
+frame_id: fake_ping
+---
+```
diff --git a/_docs/tutorials/core/programming_rcl_rclc/index.md b/_docs/tutorials/core/programming_rcl_rclc/index.md
index 01bbd8f4..8a83e683 100644
--- a/_docs/tutorials/core/programming_rcl_rclc/index.md
+++ b/_docs/tutorials/core/programming_rcl_rclc/index.md
@@ -1,8 +1,6 @@
---
title: Programming with rcl and rclc
permalink: /docs/tutorials/core/programming_rcl_rclc/
-redirect_from: /docs/tutorials/core/
-redirect_from: /docs/tutorials/
---
## Programming client/service with rcl
diff --git a/_docs/tutorials/demos/crazyflie_demo/index.md b/_docs/tutorials/demos/crazyflie_demo/index.md
index cc34893b..7447d116 100644
--- a/_docs/tutorials/demos/crazyflie_demo/index.md
+++ b/_docs/tutorials/demos/crazyflie_demo/index.md
@@ -1,302 +1,10 @@
---
title: Crazyflie Demo
+layout: docs_noheader
permalink: /docs/tutorials/demos/crazyflie_demo/
redirect_from:
- /crazyflie_demo/
---
-This demo aims to expose a **micro-ROS** use case. It runs on a pair of embedded devices:
-a [**Crazyflie 2.1**](https://www.bitcraze.io/crazyflie-2-1/) drone, used as a user controller,
-and a [**Kobuki Turtlebot 2**](https://www.turtlebot.com/turtlebot2/) as a mobile and controlled device.
-
-
-
-Both of them rely on **micro-ROS** publication and subscription mechanisms and use an underlying [**Micro XRCE-DSS client**](https://micro-xrce-dds.readthedocs.io/en/latest/).
-
-This demo also includes conventional ROS 2 tooling as a demonstration of integration with **ROS 2**. We use Gazebo, RVIZ and simple ROS 2 nodes (aka **external nodes**) acting as data converters.
-
-This demo was developed taking as base the [Kobuki demo](/docs/tutorials/demos/kobuki_demo).
-
-## Index
-- [Installation](#installation)
- - [Install external ROS 2 nodes](#install-external-ros-2-nodes)
- - [Build and flash Crazyflie 2.1 firmware](#build-and-flash-crazyflie-21-firmware)
- - [Install Crazyflie Client + Bridge](#install-crazyflie-client--bridge)
- - [Build and flash Kobuki Turtlebot 2 firmware](#build-and-flash-kobuki-turtlebot-2-firmware)
-- [Usage](#usage)
- - [Run Kobuki Turtlebot 2 Node](#run-kobuki-turtlebot-2-node)
- - [Run Crazyflie 2.1 Node](#run-crazyflie-21-node)
- - [Run external ROS 2 nodes](#run-external-ros-2-nodes)
- - [Run RVIZ visualizers](#run-rviz-visualizers)
-
-## Setup
-
-The proposed demo is composed of different kind of messages and topics.
-
-The **Crazyflie 2.1** drone relies on [ST STM32F405](https://www.st.com/en/microcontrollers-microprocessors/stm32f405-415.html) MCU running **[FreeRTOS](https://www.freertos.org/)**. Using the RTOS capabilities and the integrated radio communication device, the drone can run a node that publishes:
-- its own relative position as a 3D vector (X, Y and Z) using a *geometry_msg/Point32* message type on */drone/odometry* topic.
-- its own attitude as a 3D vector (pitch, roll and yaw) using a *geometry_msg/Point32* message type on */drone/attitude* topic.
-
-The **Kobuki Turtlebot 2** robot is controlled using a UART protocol through a custom DB25 connector. The micro-ROS node runs on an Olimex STM32-E407 board attached to that UART port. This hardware features a [ST STM32F407](https://www.st.com/en/microcontrollers-microprocessors/stm32f407-417.html) MCU running **[Nuttx](https://nuttx.org/)** RTOS. In the same way, this node can communicate with the robot (UART) and with the ROS2 world (integrated Ethernet). Its used topics are:
-- a subscription on */cmd_vel* topic (*geometry_msg/Twist* message type) to receive the controlling angular and linear velocity.
-- a publication on */robot_pose* topic (*geometry_msg/Vector3* message type) which includes X position, Y position and robot yaw.
-
-The **external ROS 2 nodes** are rclpy tools with some different functionalities:
-- *attitude_to_vel.py*
- - Converts Crazyflie */drone/attitude* to Kobuki Turtlebot 2 */cmd_vel* so that drone pitch is mapped to robot linear velocity and drone roll to angular valocity.
- - Converts Crazyflie publications on */drone/attitude* and */drone/attitude* topics to *tf2_msgs/TFMessage* messages (required by RVIZ visualizer)
-- *odom_to_tf.py*
- - Converts Kobuki Turtlebot 2 publications on */robot_pose* topic to *tf2_msgs/TFMessage* messages (required by RVIZ visualizer).
-
-The following image shows the described setup.
-
-
-
-## Required Hardware
-
-This setup uses the following hardware:
-
-| Item | |
-|---------------|----------------------------------------------------------|
-| Kobuki Turtlebot 2 | [Link](https://www.turtlebot.com/turtlebot2/) |
-| Olimex STM32-E407 | [Link](https://www.olimex.com/Products/ARM/ST/STM32-E407/open-source-hardware) |
-| Olimex ARM-USB-TINY-H | [Link](https://www.olimex.com/Products/ARM/JTAG/ARM-USB-TINY-H/) |
-| Crazyflie 2.1 | [Link](https://store.bitcraze.io/products/crazyflie-2-1) |
-| Flow Desk v2 | [Link](https://store.bitcraze.io/collections/decks/products/flow-deck-v2) |
-| Debug adapter | [Link](https://store.bitcraze.io/collections/accessories/products/debug-adapter) |
-| Crazyradio PA 2.4 GHz USB dongle | [Link](https://store.bitcraze.io/collections/accessories/products/crazyradio-pa) |
-| Additional battery + charger (optional) | [Link](https://store.bitcraze.io/collections/accessories/products/240mah-lipo-battery-including-500ma-usb-charger) |
-
-
-# Installation
-
-## Install external ROS 2 nodes
-
-[Install Micro XCRE-DDS](https://micro-xrce-dds.readthedocs.io/en/latest/installation.html). Recommended procedure:
-
-```bash
-git clone https://github.com/eProsima/Micro-XRCE-DDS.git -b v1.1.0
-cd Micro-XRCE-DDS
-mkdir build && cd build
-cmake ..
-make
-sudo make install
-```
-
-Create a workspace folder for this demo:
-```bash
-mkdir -p crazyflie_demo/src
-cd crazyflie_demo
-```
-
-Clone this repo:
-```bash
-git clone --single-branch --branch crazyflie_demo https://github.com/micro-ROS/micro-ROS_kobuki_demo src
-```
-
-[Install Gazebo](http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install#InstallGazebousingUbuntupackages). Recommended procedure:
-```bash
-curl -sSL http://get.gazebosim.org | sh
-```
-
-[Install gazebo_ros_pkgs (ROS 2)](http://gazebosim.org/tutorials?tut=ros2_installing&cat=connect_ros). Recommended procedure:
-```bash
-source /opt/ros/dashing/setup.bash
-wget https://bitbucket.org/api/2.0/snippets/chapulina/geRKyA/f02dcd15c2c3b83b2d6aac00afe281162800da74/files/ros2.yaml
-vcs import src < ros2.yaml
-rosdep update && rosdep install --from-paths src --ignore-src -r -y
-rm ros2.yaml
-```
-
-Build the project:
-```bash
-source /opt/ros/dashing/setup.bash
-rosdep update && rosdep install --from-paths src --ignore-src -r -y
-colcon build --symlink-install
-```
-
-## Build and flash Crazyflie 2.1 firmware
-
-Install the toolchain:
-```bash
-sudo add-apt-repository ppa:team-gcc-arm-embedded/ppa
-sudo apt-get update
-sudo apt install gcc-arm-embedded dfu-util
-```
-
-Download and build the **Crazyflie 2.1** firmware repository:
-```bash
-mkdir crazyflie_firmware
-git clone https://github.com/eProsima/crazyflie-firmware -b crazyflie_demo
-cd crazyflie_firmware
-git submodule init
-git submodule update
-make PLATFORM=cf2
-```
-
-Unplug the **Crazyflie 2.1** battery
-
-Push the reset button while connecting the USB power supply.
-
-The top-left blue LED blinks, first slowly and after 4 seconds sightly faster, now it is in DFU programming mode. Check it with `lsusb`:
-```bash
-Bus 001 Device 051: ID 0483:df11 STMicroelectronics STM Device in DFU Mode
-```
-
-Flash the device:
-```bash
-sudo dfu-util -d 0483:df11 -a 0 -s 0x08000000 -D cf2.bin
-```
-
-Unplug and plug the **Crazyflie 2.1** power to exit DFU mode.
-
-
-## Install Crazyflie Client + Bridge
-
-Install dependencies:
-```
-sudo apt-get install libusb-1.0-0-dev
-sudo apt-get install python3 python3-pip python3-pyqt5 python3-pyqt5.qtsvg
-```
-
-Fix permissions for the Crazyradio PA 2.4 GHz USB dongle (restart required for apply changes):
-```
-sudo groupadd plugdev
-sudo usermod -a -G plugdev $USER
-sudo echo SUBSYSTEM==\"usb\", ATTRS{idVendor}==\"1915\", ATTRS{idProduct}==\"7777\", \
-MODE=\"0664\", GROUP=\"plugdev\" > /etc/udev/rules.d/99-crazyradio.rules
-sudo echo SUBSYSTEM==\"usb\", ATTRS{idVendor}==\"0483\", ATTRS{idProduct}==\"5740\", \
-MODE=\"0664\", GROUP=\"plugdev\" > /etc/udev/rules.d/99-crazyflie.rules
-```
-
-Clone the repo dependencies:
-```
-git clone -b Micro-XRCE-DDS_Bridge https://github.com/eProsima/crazyflie-clients-python
-```
-
-## Build and flash Kobuki Turtlebot 2 firmware
-
-Create a workspace for building **micro-ROS**:
-```
-source /opt/ros/crystal/setup.bash
-sudo apt install python-rosdep curl flex ed gperf openocd automake ed bison libncurses5-dev gcc-arm-none-eabi clang clang-tidy usbutils
-mkdir -p kobuki-firmware/src
-cd kobuki-firmware
-git clone --recursive -b crazyflie_demo https://github.com/micro-ROS/micro-ros-build.git src/micro-ros-build
-colcon build --packages-select micro_ros_setup
-source install/local_setup.bash
-```
-
-Build **micro-ROS Agent**:
-```
-ros2 run micro_ros_setup create_agent_ws.sh
-colcon build
-source install/local_setup.sh
-```
-
-Install tools:
-```
-git clone https://bitbucket.org/nuttx/tools.git ~/tools
-pushd ~/tools/kconfig-frontends >/dev/null
-./configure --enable-mconf --disable-nconf --disable-gconf --disable-qconf
-LD_RUN_PATH=/usr/local/lib && make && make install && ldconfig
-popd >/dev/null
-```
-
-Build Olimex STM32-E407 firmware:
-```
-ros2 run micro_ros_setup create_firmware_ws.sh
-cd firmware/NuttX
-tools/configure.sh configs/olimex-stm32-e407/uros
-cd ../..
-
-#Put here your agent IP and port
-find ./firmware/mcu_ws/ -name rmw_microxrcedds.config -exec sed -i "s/CONFIG_IP=127.0.0.1/CONFIG_IP=192.168.8.10/g" {} \;
-find ./firmware/mcu_ws/ -name rmw_microxrcedds.config -exec sed -i "s/CONFIG_PORT=8888/CONFIG_PORT=9999/g" {} \;
-
-ros2 run micro_ros_setup build_firmware.sh
- ```
-
-Connect Olimex ARM-USB-TINY-H JTAG debugger to Olimex STM32-E407 and flash the board:
-```
-cd firmware/NuttX
-scripts/flash.sh olimex-stm32-e407
-```
-
-# Usage
-
-After installation, the following packages should be present in your system:
-
-```
-.
-+-- Micro-XRCE-DDS # used for installing Micro-XRCE-DDS
-+-- crazyflie_demo
-+-- crazyflie-firmware # used for building and flashing Crazyflie 2.1 firmware
-+-- kobuki-firmware # used for building and flashing Kobuki Turtlebot 2 firmware
-+-- crazyflie-clients-python
-```
-
-Make sure that all ROS 2 or micro-ROS nodes created along with the following steps **can reach each other using its network interfaces**.
-
-## Run Kobuki Turtlebot 2 Node
-
-TODO: Explain data and power connections between Kobuki Turtlebot 2, Olimex STM32-E407 and MiniRouter.
-
-Run the **micro-ROS Agent**:
-```
-cd kobuki-firmware
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 run micro_ros_agent micro_ros_agent udp 9999
-```
-
-**micro-ROS Agent** should receive an incoming client connection and */robot_pose* topic should be published. Check it with `ros2 topic echo /robot_pose`
-
-## Run Crazyflie 2.1 Node
-
-Connect Crazyradio PA 2.4 GHz USB dongle and turn on Crazyflie 2.1 drone.
-
-Run the Crazyflie Client + Bridge:
-```
-cd crazyflie-clients-python
-python3 bin/cfclient
-```
-
-This command should open the Crazyflie Client and print a serial device path in the terminal (something like /dev/pts/0).
-
-Run (in another prompt) a **Micro XRCE-DDS Agent**:
-```
-MicroXRCEAgent serial --dev [serial device]
-```
-
-**Micro XRCE-DDS Agent** should receive an incoming client connection and */drone/attitude* and */drone/position* topics should be published. Check it with `ros2 topic echo /drone/attitude` and `ros2 topic echo /drone/position`
-
-
-## Run external ROS 2 nodes
-
-Run commands:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 run micro-ros_crazyflie_demo_remote attitude_to_vel
-```
-
-Topic */cmd_vel* should be published, and the **Kobuki Turtlebot 2** should start moving. Check it with `ros2 topic echo /cmd_vel`
-
-## Run RVIZ visualizers
-Run complete visualizer:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 launch micro-ros_crazyflie_demo_remote launch_drone_position.launch.py
-```
-
-RVIZ windows should be open, and a Crazyflie 2.1 drone model should represent the drone attitude and position along with a historic path.
-
-Run attitude visualizer:
-```
-cd crazyflie_demo
-source /opt/ros/crystal/setup.bash && source install/local_setup.bash
-ros2 launch micro-ros_crazyflie_demo_remote launch_drone_attitude.launch.py
-```
-
-RVIZ windows should be open and a Crazyflie 2.1 drone model should represent **only** the drone attitude.
\ No newline at end of file
+{% capture my_include %}{% include crazyflie_demo/README.md %}{% endcapture %}
+{{ my_include | markdownify }}
\ No newline at end of file
diff --git a/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png b/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png
deleted file mode 100644
index 0133a1ee..00000000
Binary files a/_docs/tutorials/demos/crazyflie_demo/micro-ROS_crazyflie.png and /dev/null differ
diff --git a/_docs/tutorials/demos/tof_demo/index.md b/_docs/tutorials/demos/tof_demo/index.md
index 5dc4a63a..f9a4d19d 100644
--- a/_docs/tutorials/demos/tof_demo/index.md
+++ b/_docs/tutorials/demos/tof_demo/index.md
@@ -1,5 +1,8 @@
---
title: Time of Flight Sensor Demo
+layout: docs_noheader
permalink: /docs/tutorials/demos/tof_demo/
---
-WIP
\ No newline at end of file
+
+{% capture my_include %}{% include sensors_demo/README.md %}{% endcapture %}
+{{ my_include | markdownify }}
\ No newline at end of file
diff --git a/_includes/crazyflie_demo b/_includes/crazyflie_demo
new file mode 160000
index 00000000..841122e4
--- /dev/null
+++ b/_includes/crazyflie_demo
@@ -0,0 +1 @@
+Subproject commit 841122e49651a85d3e0d07fc01b9a2857c4cff99
diff --git a/_includes/sensors_demo b/_includes/sensors_demo
new file mode 160000
index 00000000..12bb858d
--- /dev/null
+++ b/_includes/sensors_demo
@@ -0,0 +1 @@
+Subproject commit 12bb858d105897dacf193516194ed059c31819c9
diff --git a/_layouts/docs_noheader.html b/_layouts/docs_noheader.html
new file mode 100644
index 00000000..2fbd6a39
--- /dev/null
+++ b/_layouts/docs_noheader.html
@@ -0,0 +1,26 @@
+---
+layout: default
+---
+
+